Symplectic Integrator on GPUs
Demonstrating mathematical integrity under GPU parallelization and reduced precision.
GPU-Accelerated Symplectic Integrator — Mathematical Documentation
Overview
This document explains the mathematical foundations and numerical methods implemented in this project, with a focus on:
- Hamiltonian dynamics
- The Hénon–Heiles system
- Structure-preserving (symplectic) integration
- GPU-parallel execution
The goal is to simulate nonlinear dynamical systems faithfully over long time horizons, where naive high-accuracy methods often fail.
1. Hamiltonian Mechanics
1.1 Phase Space
The system evolves in a 4-dimensional phase space:
[ (q, p) = (x, y, p_x, p_y) ]
- (q = (x, y)): position
- (p = (p_x, p_y)): momentum
Phase Space Trajectory
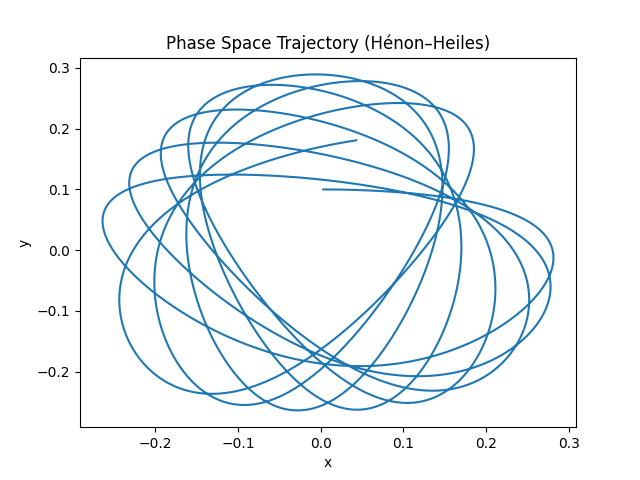
This shows the trajectory in configuration space ((x, y)). For chaotic regimes, the trajectory explores complex regions of phase space.
1.2 Hamiltonian Function
The total energy of the system is:
[ H(x,y,p_x,p_y) = T(p) + V(x,y) ]
with:
-
Kinetic energy: [ T = \frac{1}{2}(p_x^2 + p_y^2) ]
-
Potential energy (Hénon–Heiles): [ V(x,y) = \frac{1}{2}(x^2 + y^2) + x^2 y - \frac{1}{3} y^3 ]
1.3 Equations of Motion
Hamilton’s equations:
[ \dot{x} = p_x, \quad \dot{y} = p_y ] [ \dot{p}_x = -\frac{\partial V}{\partial x}, \quad \dot{p}_y = -\frac{\partial V}{\partial y} ]
1.4 Gradient of the Potential
[ \frac{\partial V}{\partial x} = x + 2xy ] [ \frac{\partial V}{\partial y} = y + x^2 - y^2 ]
These are computed in the CUDA device function:
compute_gradients(x, y, grad_x, grad_y)
2. Geometry of Hamiltonian Systems
Hamiltonian systems have special structure:
2.1 Phase Space Flow
p
↑
│ trajectories follow level sets of H
│ ⟲ ⟲ ⟲
│ ⟲ ⟲ ⟲
│ ⟲
└──────────────→ q
- Motion stays on constant-energy surfaces
- Flow is volume-preserving (Liouville’s theorem)
2.2 Key Invariants
- Energy (H) is conserved
- Phase-space volume is conserved
- Trajectories lie on manifolds
3. Numerical Integration Challenge
Standard methods (e.g., RK4):
- Minimize local truncation error
- Destroy global structure
Result:
Energy Conservation
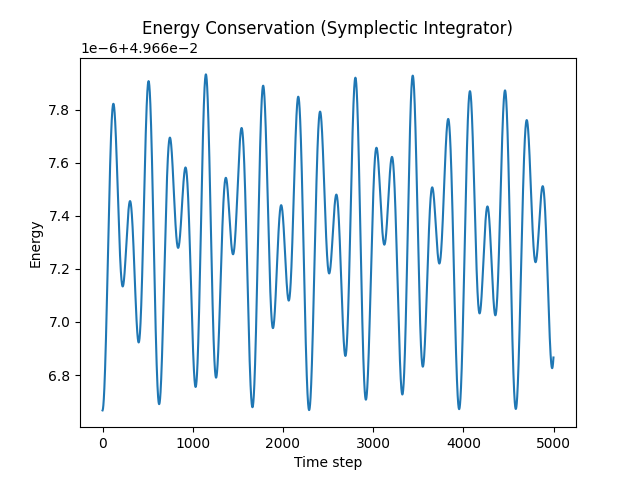
The symplectic integrator preserves energy up to bounded oscillations, demonstrating long-term stability.
4. Symplectic Integrator (Leapfrog / Verlet)
4.1 Algorithm
The symplectic method splits updates into half-step momentum and full-step position:
[ p_{n+1/2} = p_n - \frac{\Delta t}{2} \nabla V(q_n) ]
[ q_{n+1} = q_n + \Delta t , p_{n+1/2} ]
[ p_{n+1} = p_{n+1/2} - \frac{\Delta t}{2} \nabla V(q_{n+1}) ]
4.2 Geometric Interpretation
Instead of approximating the trajectory directly, we approximate the flow map:
Step splitting:
[Kick] → [Drift] → [Kick]
p ----> p_half ----> p_next
\ |
\ |
\ v
q --------> q_next
4.3 Why It Works
Symplectic integrators preserve:
- Phase-space structure
- Symplectic 2-form
- Long-term qualitative behavior
4.4 Energy Behavior
Instead of drifting:
Energy vs Time (Symplectic)
E
│ ~~~~~~~~
│ ~ ~
│ ~ ~
│~ ~
└────────────── t
Energy error is:
[ H(t) = H(0) + \mathcal{O}(\Delta t^2) ]
but remains bounded.
5. Comparison of Integrators
| Method | Order | Symplectic | Energy Behavior | Long-Term Stability |
|---|---|---|---|---|
| Euler | 1 | ❌ | Diverges | ❌ |
| RK4 | 4 | ❌ | Drifts slowly | ❌ |
| Leapfrog | 2 | ✅ | Oscillatory, bounded | ✅ |
6. CUDA Parallelization Model
6.1 Problem Structure
Each trajectory evolves independently:
[ z_i(t) \rightarrow z_i(t + \Delta t) ]
6.2 GPU Mapping
Thread i → trajectory i
(x[i], y[i], px[i], py[i])
6.3 Memory Layout
Structure of Arrays (SoA):
x: [x0 x1 x2 x3 ...]
y: [y0 y1 y2 y3 ...]
px: [p0 p1 p2 p3 ...]
py: [p0 p1 p2 p3 ...]
Benefits:
- Coalesced memory access
- High bandwidth utilization
6.4 Kernel Execution
integrator_kernel<<<grid, block>>>(...)
Each thread performs:
for step in time:
symplectic_update()
7. Energy Diagnostics
Energy is computed as:
[ E_i = \frac{1}{2}(p_x^2 + p_y^2) + V(x,y) ]
Used for:
- Verifying correctness
- Comparing integrators
- Detecting numerical instability
8. Key Insight
High-order accuracy is not enough for physical simulation.
- RK4: accurate trajectory locally, wrong globally
- Symplectic: slightly less accurate locally, correct physics globally
9. Extensions
9.1 Higher-Order Symplectic Methods
- Yoshida integrators
- Forest–Ruth splitting
9.2 Advanced Analysis
- Poincaré sections
- Lyapunov exponents
- Chaos detection
9.3 HPC Extensions
- Mixed precision (FP32/FP64 hybrid)
- Multi-GPU scaling
- Adaptive batching
10. Summary
This project demonstrates:
- How Hamiltonian structure drives algorithm choice
- Why symplectic integrators are essential
- How GPUs enable massively parallel trajectory simulation
11. Minimal Conceptual Diagram
Hamiltonian System
↓
Equations of Motion
↓
Discretization Choice
↓
┌───────────────┬─────────────────┐
│ Standard ODE │ Symplectic │
│ Methods │ Integrators │
├───────────────┼─────────────────┤
│ RK4 │ Leapfrog │
│ High accuracy │ Structure-pres. │
│ Energy drift │ Energy bounded │
└───────────────┴─────────────────┘
↓
GPU Parallel Execution
↓
Millions of trajectories
Final Remark
This codebase is a compact example of a deep principle:
Preserving mathematical structure is often more important than minimizing numerical error.
This is especially true in:
- Computational physics
- Molecular dynamics
- Celestial mechanics
- Long-term dynamical simulations